1. Требования к конструкции
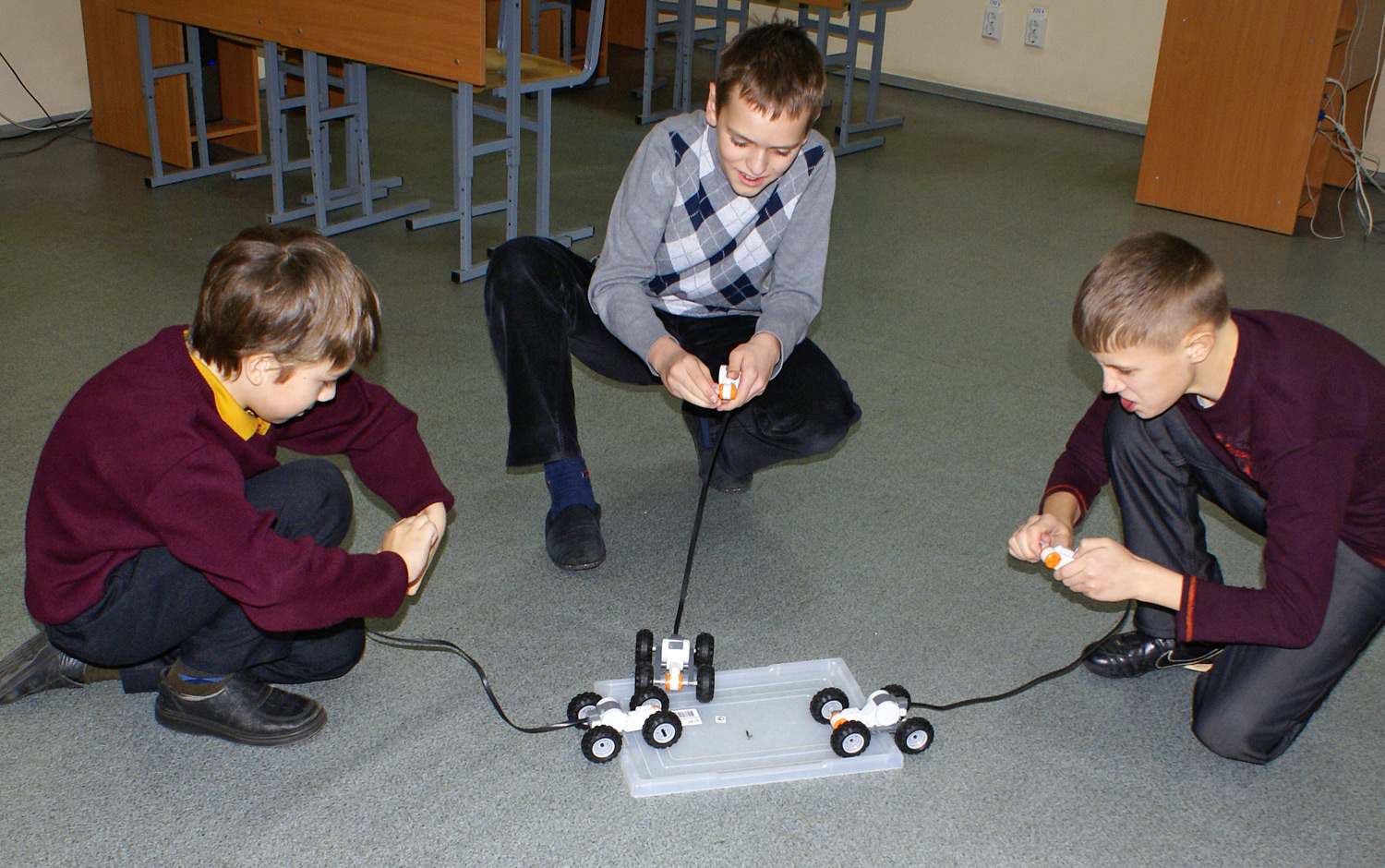
Это самая распространенная разновидность роботов. Тележка может быть с тремя точками опоры, две из которых - ведущие колеса, а третья - волокуша, или свободно вращающееся колесико.
2. Процесс построения одной из наиболее простых тележек
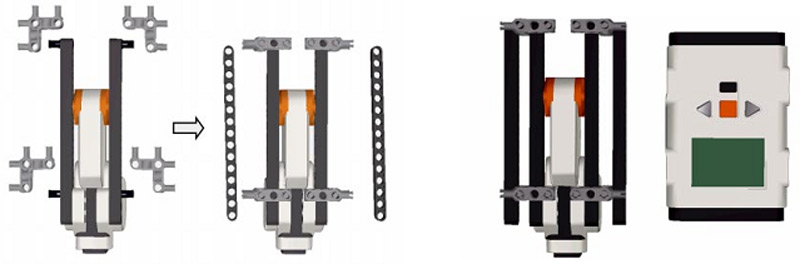
Шаг 1. Для крепления моторов, которые будут располагаться по обе стороны от NXT, берем две изогнутые балки:

Шаг 2. В зависимости от расположения балок центр тяжести тележки может быть смещен:

Шаг3. Дополнительные крепления для придания устойчивости:

Все готово для установки контроллера:

Шаг 4. Колеса устанавливаются на 6-модульные оси, втулки предохраняют от нежелательного трения о корпус.

Шаг 4. Колеса устанавливаются на 6-модульные оси, втулки предохраняют от нежелательного трения о корпус.

Шаг 5. Конструкция для крепления третьего колеса:

Шаг 6. Элементы подвижного колеса. Длины осей - 3 и 5 модулей. Колесо должно вращаться свободно.

Сборка заднего подвижного колеса. Оси должны вращаться свободно.

Тележка готова.


Тележка готова.

3. Продолжаем знакомство со средой Robolab 2.9

Палитра функций включает в себя различные типы команд:
 Простейшие алгоритмы
Простейшие алгоритмы
1. Квадрат. По умолчанию считаем, что левый мотор подключен к порту В, правый - к порту С. Проверьте подключение.
Повторяй 4 раза:


1. Квадрат. По умолчанию считаем, что левый мотор подключен к порту В, правый - к порту С. Проверьте подключение.
Повторяй 4 раза:
- моторы B, C вперед;
- жди N/100 секунды;
- мотор С назад (B продолжает двигаться вперед);
- жди N/100 секунды.

2. Парковка. Напишите самостоятельно программу парковки в гараж (конструкцию строим из подручных материалов).














































{kind=link}